MacOS下可以通过终端输入ssh username@your.server.url ,然后根据提示输入相应的密码即可实现远程ssh登录,通过exit命令可以退出连接。
windows可以使用Bitvise SSH Client 进行ssh登录。(目前使用的是Bitvise SSH Client 6.31)
MacOS下可以通过终端输入ssh username@your.server.url ,然后根据提示输入相应的密码即可实现远程ssh登录,通过exit命令可以退出连接。
windows可以使用Bitvise SSH Client 进行ssh登录。(目前使用的是Bitvise SSH Client 6.31)
题目描述
定义栈的数据结构,请在该类型中实现一个能够得到栈最小元素的min函数。
题解:
使用一个小根堆和一个元素出现次数数组来维护这个栈;
每次push一个元素,该元素出现次数+1,并把该元素压进小根堆
每次pop一个元素,该元素出现次数-1,如果小根堆的栈顶元素出现次数为0,则一直pop,直到栈顶元素出现次数不为0
AC代码:
[shell]
/*
题目描述
定义栈的数据结构,请在该类型中实现一个能够得到栈最小元素的min函数。
题解:
使用一个小根堆和一个元素出现次数数组来维护这个栈;
每次push一个元素,该元素出现次数+1,并把该元素压进小根堆
每次pop一个元素,该元素出现次数-1,如果小根堆的栈顶元素出现次数为0,则一直pop,直到栈顶元素出现次数不为0
*/
class Solution {
public:
stack<int> s;
map<int, int> m;
static struct cmp
{
bool operator()(const int&a, const int &b)
{
return a>b;
}
};
priority_queue<int, vector<int>, cmp> pq;
void push(int value) {
s.push(value);
pq.push(value);
m[value]++;
}
void pop() {
m[s.top()]–;
s.pop();
while (m[pq.top()] == 0)
pq.pop();
}
int top() {
return s.top();
}
int min() {
return pq.top();
}
};
[/shell]
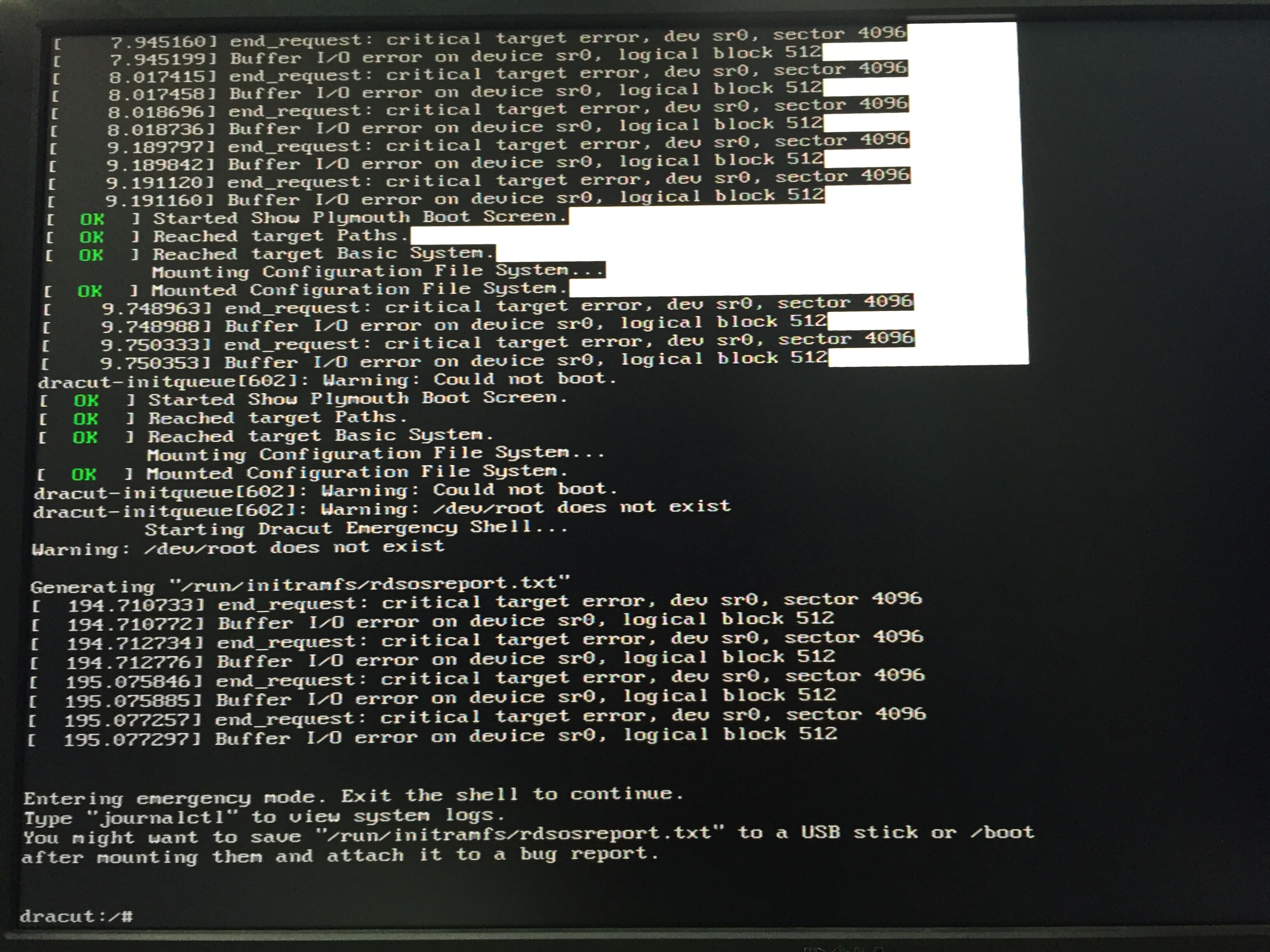
在安装centOS的时候,出现了大量的错误,如下:
[shell]
Buffer I/O error on device sr0, logical block 512
end_request: critical target error, dev sr0, sector 4096
[/shell]
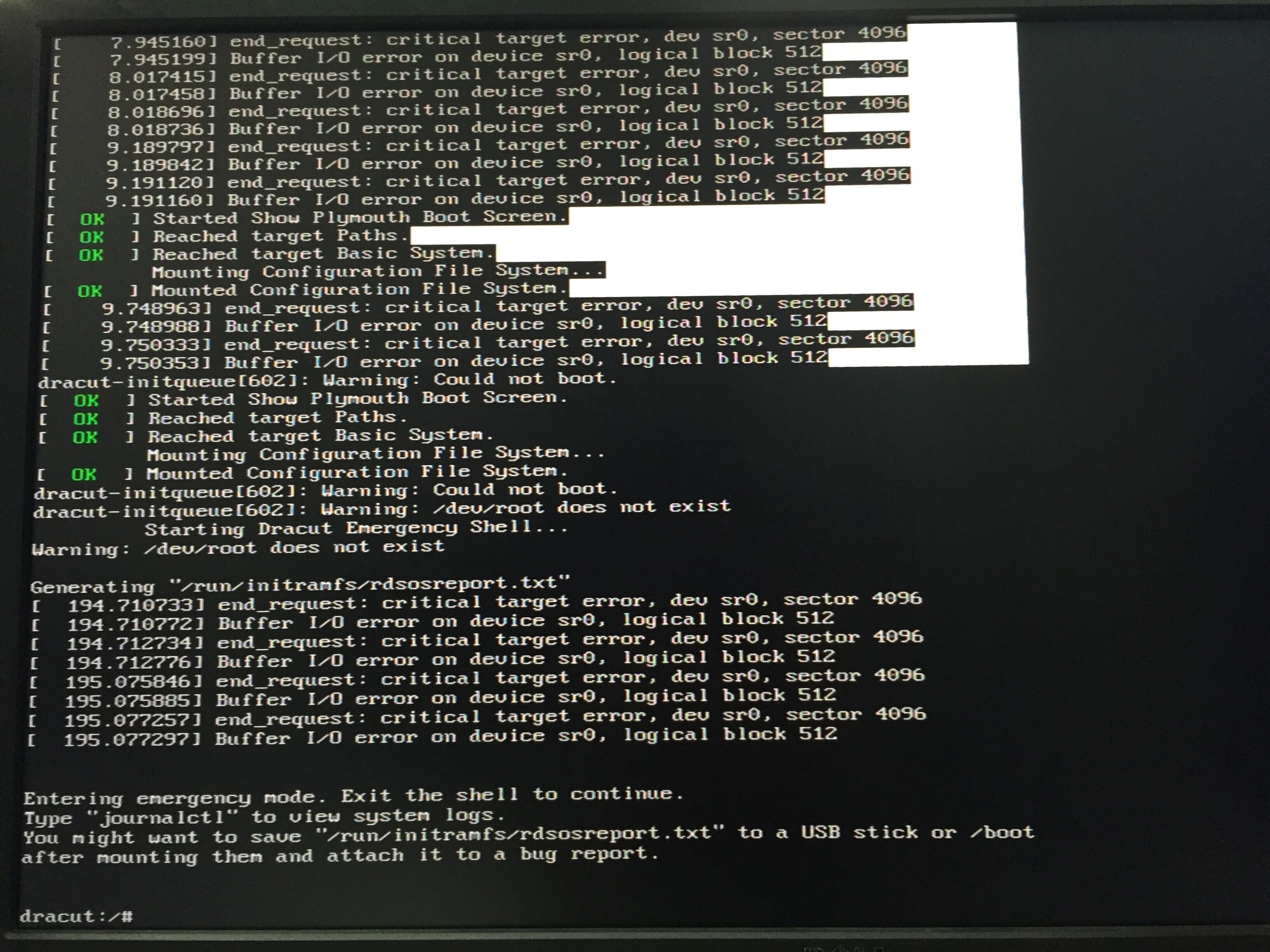
导致无法继续安装。后来在网上找到ubuntu论坛的相关说法:http://ubuntuforums.org/showthread.php?t=999549
其中提到是否是安装盘出现错误,于是我想起了我通过两个usb扩展坞来接USB,用USB来安装,可能导致安装失败。于是我把USB直接插到电脑上,可以正常安装。
方法一:
计算整个程序运行的时间。可以使用time命令,譬如我要运行的文件是app,正常情况下是在终端里面输入./app ,我们可以使用time ./app运行程序,在程序结束后,会看到一些时间参数,其中Real是程序实力占用时间user是程序用时间包括一些输出信息等,sys是系统使用时间,比如库的调用。
方法二:
测量程序中部分代码运行时间。
首先包含头文件:
[c language=”++”]
#include <sys/time.h>
[/c]
然后新建时间结构:
[c language=”++”]
struct timeval StartTime;
struct timeval EndTime;
double TimeUse=0;
gettimeofday(&StartTime, NULL);
//要测量的程序代码
gettimeofday(&EndTime, NULL);
TimeUse = 1000000*(EndTime.tv_sec-StartTime.tv_sec)+EndTime.tv_usec-StartTime.tv_usec;
TimeUse/=1000;
cout<<“总花费时间为:”<<TimeUse<<“ms”<<endl;
cout<<“总花费时间为:”<<TimeUse/1000<<“s”<<endl;
cout<<“总花费时间为:”<<(int)(TimeUse/1000)/60<<“分”<<((int)(TimeUse/1000))%60<<“秒”<<endl;
[/c]
自从安装了win7或者win8的64位系统后,配置完成opencv会出现下图的问题:应用程序无法正常启动(0xc000007b)问题。请单击“确定”关闭应用程序。

经过多轮尝试,终于解决了这个问题。我们一般创建控制台程序的时候,配置管理器默认给我们配置了win32的活动解决方案平台。


我们新增一个x64平台,如下图,从原来的Win32平台复制设置过去。


然后查看项目属性,把库目录中的opencv的x86改为x64即可。(假如环境变量当初使用了x86,也要改为x64),如下图:


最后编译运行程序,顺利解决问题!
1.需要包含头文件netinet/in.h,IPPROTO_TCP、IPPROTO_IPV6等定义在这个头文件中。
2.exit定义在stdlib.h中。
3.需要定义sock_str_flag、sock_str_int、sock_str_linger和sock_str_timeval。
4.理论上每个sock_opts都应该用ifdef进行判断,但是考虑到centos本身就没有sctp相关选项,所以直接屏蔽。
checkopts.cpp,github网址:https://github.com/siukwan/unix/tree/master/7thChapterSocketOpt
代码如下:
[c language=”++”]
/*
* sock_opts定义应该每一个都有if else的判断
* 实际情况是没有sctp的选项,于是直接屏蔽
*
*/
#include<stdio.h>
#include<iostream>
#include<netinet/tcp.h>
#include<netinet/in.h>
#include<sys/socket.h>
#include <stdarg.h>
#include<syslog.h>
#include<errno.h>
#include<string.h>
#include<stdlib.h>
#include<unistd.h>
using namespace std;
#define MAXLINE 1024
int daemon_proc;
void err_ret(const char *fmt,…);
void err_quit(const char *fmt,…);
union val{
int i_val;
long l_val;
linger linger_val;
timeval timeval_val;
}sock_val;
static char *sock_str_flag(val *,int);
static char *sock_str_int(val*,int);
static char *sock_str_linger(val* ,int);
static char *sock_str_timeval(val*,int);
struct opts{
const char *opt_str;
int opt_level;
int opt_name;
char *(*opt_val_str)(val *,int);
}sock_opts[]={
{"SO_BROADCAST", SOL_SOCKET, SO_BROADCAST, sock_str_flag },
{"SO_DEBUG", SOL_SOCKET, SO_DEBUG, sock_str_flag },
{"SO_DONTROUTE", SOL_SOCKET, SO_DONTROUTE, sock_str_flag },
{"SO_ERROR", SOL_SOCKET, SO_ERROR, sock_str_int },
{"SO_KEEPALIVE", SOL_SOCKET, SO_KEEPALIVE, sock_str_flag },
{"SO_LINGER", SOL_SOCKET, SO_LINGER, sock_str_linger },
{"SO_OOBINLINE", SOL_SOCKET, SO_OOBINLINE, sock_str_flag },
{"SO_RCVBUF", SOL_SOCKET, SO_RCVBUF, sock_str_int },
{"SO_SNDBUF", SOL_SOCKET, SO_SNDBUF, sock_str_int },
{"SO_RCVLOWAT", SOL_SOCKET, SO_RCVLOWAT, sock_str_int },
{"SO_SNDLOWAT", SOL_SOCKET, SO_SNDLOWAT, sock_str_int },
{"SO_RCVTIMEO", SOL_SOCKET, SO_RCVTIMEO, sock_str_timeval },
{"SO_SNDTIMEO", SOL_SOCKET, SO_SNDTIMEO, sock_str_timeval },
{"SO_REUSEADDR", SOL_SOCKET, SO_REUSEADDR, sock_str_flag },
#ifdef SO_REUSEPORT
{"SO_REUSEPORT", SOL_SOCKET, SO_REUSEPORT, sock_str_flag },
#else
{"SO_REUSEPORT", 0, 0, NULL },
#endif
{"SO_TYPE", SOL_SOCKET, SO_TYPE, sock_str_int },
#ifdef SO_USELOOPBACK
{"SO_USELOOPBACK", SOL_SOCKET, SO_USELOOPBACK, sock_str_flag },
#else
{"SO_USELOOPBACK", 0, 0, NULL },
#endif
#ifdef IP_TOS
{"IP_TOS", IPPROTO_IP, IP_TOS, sock_str_int },
#else
{"IP_TOS", 0, 0, NULL },
#endif
#ifdef IP_TTL
{"IP_TTL", IPPROTO_IP, IP_TTL, sock_str_int },
#else
{"IP_TTL", 0, 0, NULL },
#endif
#ifdef IPV6_DONTFRAG
{"IPV6_DONTFRAG", IPPROTO_IPV6, IPV6_DONTFRAG, sock_str_flag },
#else
{"IPV6_DONTFRAG", 0, 0, NULL },
#endif
{"IPV6_UNICAST_HOPS", IPPROTO_IPV6, IPV6_UNICAST_HOPS, sock_str_int },
{"IPV6_V6ONLY", IPPROTO_IPV6, IPV6_V6ONLY, sock_str_flag },
{"TCP_MAXSEG", IPPROTO_TCP, TCP_MAXSEG, sock_str_int },
{"TCP_NODELAY", IPPROTO_SCTP, TCP_NODELAY, sock_str_flag },
// {"SCTP_AUTOCLOSE", IPPROTO_TCP, SCTP_AUTOCLOSE, sock_str_int },
// {"SCTP_MAXBURST", IPPROTO_SCTP, SCTP_MAXBURST, sock_str_int },
// {"SCTP_MAXSEG", IPPROTO_SCTP, SCTP_MAXSEG, sock_str_int },
// {"SCTP_NODELAY", IPPROTO_SCTP, SCTP_NODELAY, sock_str_flag },
{NULL, 0, 0, NULL },
};
int main(int argc,char **argv)
{
int fd;
socklen_t len;
opts *ptr;
for(ptr=sock_opts;ptr->opt_str !=NULL;ptr++)
{
printf("%s:",ptr->opt_str);
if(ptr->opt_val_str == NULL)
printf("(undefined)\n");
else
{
switch(ptr->opt_level)
{
case SOL_SOCKET:
case IPPROTO_IP:
case IPPROTO_TCP:
fd = socket(AF_INET,SOCK_STREAM,0);
break;
default:
err_quit("Can’t create fd for level %d\n",ptr->opt_level);
}
len = sizeof(val);
if(getsockopt(fd,ptr->opt_level,ptr->opt_name,&sock_val,&len) == -1)
err_ret("getsockopt error");
else
printf("default = %s\n",(*ptr->opt_val_str)(&sock_val,len));
close(fd);
}
}
}
//记录日志
void err_doit(int errnoflag, int level ,const char *fmt, va_list ap)
{
int errno_save,n;
char buf[MAXLINE+1];
errno_save = errno;
#ifdef HAVE_VSNPRINTF
vsnprintf(buf,MAXLINE, fmt , ap);
#else
vsprintf(buf,fmt,ap);
#endif
n=strlen(buf);
if(errnoflag)
snprintf(buf+n,MAXLINE-n,": %s",strerror(errno_save));
strcat(buf,"\n");
if(daemon_proc)
{
syslog(level,buf);
}
else
{
fflush(stdout);
fputs(buf,stderr);
fflush(stderr);
}
}
//错误退出,和上面一样
void err_quit(const char *fmt,…)
{
va_list ap;
va_start(ap,fmt);
err_doit(0,LOG_ERR, fmt,ap);
va_end(ap);
exit(1);
}
void err_ret(const char *fmt,…)
{
va_list ap;
va_start(ap,fmt);
err_doit(1,LOG_INFO,fmt,ap);
va_end(ap);
return ;
}
static char strres[128];
static char *
sock_str_flag(union val *ptr, int len)
{
/* *INDENT-OFF* */
if (len != sizeof(int))
snprintf(strres, sizeof(strres), "size (%d) not sizeof(int)", len);
else
snprintf(strres, sizeof(strres),
"%s", (ptr->i_val == 0) ? "off" : "on");
return(strres);
/* *INDENT-ON* */
}
/* end checkopts3 */
static char *
sock_str_int(union val *ptr, int len)
{
if (len != sizeof(int))
snprintf(strres, sizeof(strres), "size (%d) not sizeof(int)", len);
else
snprintf(strres, sizeof(strres), "%d", ptr->i_val);
return(strres);
}
static char *
sock_str_linger(union val *ptr, int len)
{
struct linger *lptr = &ptr->linger_val;
if (len != sizeof(struct linger))
snprintf(strres, sizeof(strres),
"size (%d) not sizeof(struct linger)", len);
else
snprintf(strres, sizeof(strres), "l_onoff = %d, l_linger = %d",
lptr->l_onoff, lptr->l_linger);
return(strres);
}
static char *
sock_str_timeval(union val *ptr, int len)
{
struct timeval *tvptr = &ptr->timeval_val;
if (len != sizeof(struct timeval))
snprintf(strres, sizeof(strres),
"size (%d) not sizeof(struct timeval)", len);
else
snprintf(strres, sizeof(strres), "%d sec, %d usec",
tvptr->tv_sec, tvptr->tv_usec);
return(strres);
}
[/c]
AVL树是最先发明的自平衡二叉查找树。在AVL树中任何节点的两个儿子子树的高度最大差别为一,所以它也被称为高度平衡树。AVL树得名于它的发明者 G.M. Adelson-Velsky 和 E.M. Landis,他们在 1962 年的论文 “An algorithm for the organization of information” 中发表了它。
其中AVL树主要的操作包括:左旋、右旋、两种情况的双旋转。下面先给出旋转的示意图:
单旋:

两种情况的双旋:
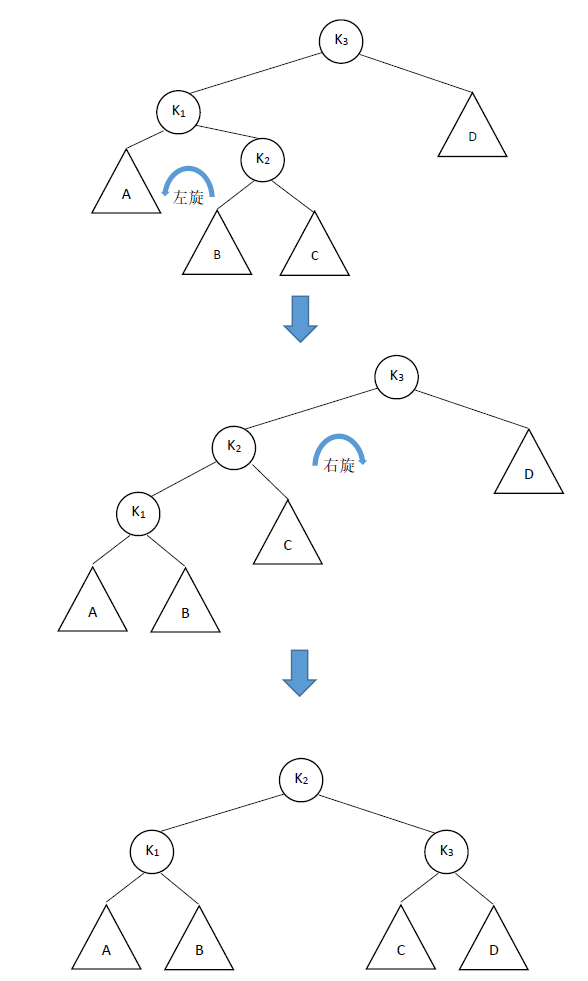
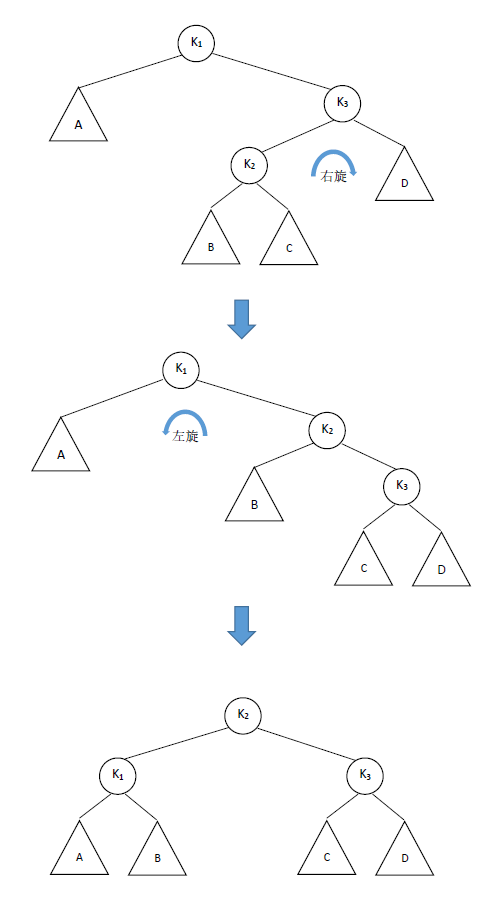
下面,根据上述的旋转示意图编写递归的代码:
[c language=”++”]
struct AvlNode{
int val, height;
AvlNode*l, *r;
AvlNode() :val(-1), height(-1), l(NULL), r(NULL){};
AvlNode(int x) :val(x), height(0), l(NULL), r(NULL){};
};
static int Height(AvlNode* T)
{//求高度
if (T == NULL) return -1;
else return T->height;
}
static AvlNode* SingleRotateLeft(AvlNode* k2)
{//左旋,把树顺时针旋转
AvlNode*k1 = k2->l;
k2->l = k1->r;
k1->r = k2;
//注意更新高度
k2->height = max(Height(k2->l), Height(k2->r)) + 1;
k1->height = max(Height(k1->l), k2->height) + 1;
return k1;
}
static AvlNode* SingleRotateRight(AvlNode* k1)
{//右旋,把树逆时针旋转
AvlNode*k2 = k1->r;
k1->r = k2->l;
k2->l = k1;
//注意更新高度
k1->height = max(Height(k1->l), Height(k1->r)) + 1;
k2->height = max(Height(k2->r), k1->height) + 1;
return k2;
}
static AvlNode* DoubleRotateLeft(AvlNode* k3)
{//先把k2(k3->l)逆时针旋转,再把k3顺时针旋转
k3->l = SingleRotateRight(k3->l);
return SingleRotateLeft(k3);
}
static AvlNode* DoubleRotateRight(AvlNode* k1)
{//先把k2(k1->r)逆时针旋转,再把k1顺时针旋转
k1->r = SingleRotateLeft(k1->r);
return SingleRotateRight(k1);
}
static AvlNode* Insert(int x, AvlNode*T)
{
if (T == NULL)//如果节点为空,则新建一个节点
T = new AvlNode(x);
else if (x < T->val)
{//x小于T的值,则插入左边
T->l = Insert(x, T->l);
if (Height(T->l) – Height(T->r) == 2)
{//插入后,左边比右边高2,则需要调整
if (x < T->l->val)//如果插入的值是在左子树的左边,则左旋即可
T = SingleRotateLeft(T);
else//如果插入的值是在左子树的右边,那么需要双旋转
T = DoubleRotateLeft(T);
}
}
else if (x > T->val)
{//如果插入的值大于T的值,则插入T的右子树中
T->r = Insert(x, T->r);
if (Height(T->r) – Height(T->l) == 2)
{//高度差为2,需要调整
if (x>T->r->val)//如果在右子树的右边,单选即可
T = SingleRotateRight(T);
else//在右子树的左边,需要双旋
T = DoubleRotateRight(T);
}
}
//注意更新高度
T->height = max(Height(T->l), Height(T->r)) + 1;
return T;
}
[/c]
这些天在弄OpenCV,用来把两张640*480的图片拼在一起,拼成1280*480,然后发现调用下面这个函数的时候内存一直在增大,貌似有些变量无法释放内存.
[c language=”++”]
void Show2Image(cv::Mat cvImg1, cv::Mat cvImg2)
{
beginTime =clock();
std::cout<<“图片合并开始时间:”<<beginTime<<std::endl;
IplImage* image1=&cvImg1.operator IplImage();
IplImage* image2=&cvImg2.operator IplImage();
IplImage* image3 = cvCreateImage( cvSize(image1->width+image2->width,MAX(image1->height,image2->height)),IPL_DEPTH_8U,3);
CvRect rect=cvRect(0,0,image1->width,image1->height);
cvSetImageROI(image3,rect);
cvCopy(image1,image3);
cvResetImageROI(image3);
rect=cvRect(image1->width,0,image2->width,image2->height);
cvSetImageROI(image3,rect);
cvCopy(image2,image3);
cvResetImageROI(image3);
cvShowImage(“Kinect Follow & Xtion ObstacleAvoide”,image3);
//cvReleaseImage(&image3);
endTime =clock();
std::cout<<“结束时间:”<<endTime<<std::endl
<<“图片合并花费时间:”<<endTime-beginTime<<std::endl<<std::endl;
}
[/c]
经过排查,发现是
IplImage* image3 = cvCreateImage( cvSize(image1->width+image2->width,MAX(image1->height,image2->height)),IPL_DEPTH_8U,3);
这句代码导致内存增大.
然后发现cvCreateImage需要和cvReleaseImage配合用,譬如上述代码,需要用cvReleaseImage(&image3);来释放image3的内存,而image1和image2不是用cvCreateImage创建的,所以不用使用cvReleaseImage来释放,假如你使用了,反而会报错.
解决方案:
在VS2010经历一些更新,或者是在装完VS2010后再安装了更高级的版本,例如VS2012,VS2013等,会出现
LINK : fatal error LNK1123: 转换到 COFF 期间失败: 文件无效或损坏
的错误!
解决方案为将 项目|项目属性|配置属性|清单工具|输入和输出|嵌入清单 “是”改为“否”即可,但是没新建一个项目都要这样设置一次。
在建立VS2010 Win32 Project项目时,按照上面解决方案依然发生了“error LNK1123”错误,经过上网查资料,解决方案为:
第一步:与上相同。
第二步:将 项目|项目属性|配置属性|连接器|清单文件|嵌入清单 “是”改为“否”。
第三步:一般计算机经过上两步设置就能解决问题了,但是如果还有问题,那就按一下方法解决:
找到Microsoft Visual Studio 10.0\VC\bin ,把cvtres.exe删除,然后找到新版本的VC\bin里面的cvtres.exe拷贝过来.
例如,我的VS2010 bin路径是在 C:\Program Files\Microsoft Visual Studio 10.0\VC\bin
VS2012 bin路径是在D:\Program Files\Microsoft Visual Studio 12.0\VC\bin
把10.0\bin里面的cvtres.exe删除,把12.0\bin里面的cvtres.exe复制到10.0\bin里面
然后运行程序就没问题了!
意外的是,治本的办法是第三步,删除旧版本的cvtres.exe后,就不需要每次都设置配置了。
{kind=link}